Robot palettisation Hick
Description
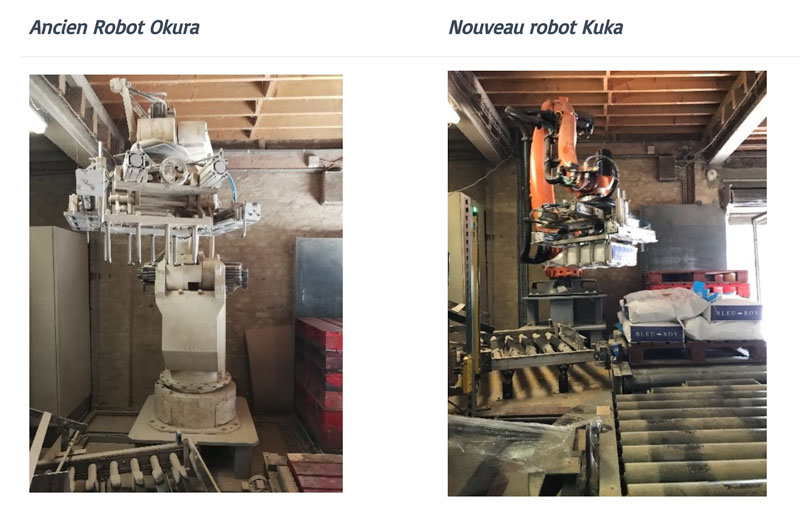
L’ancien robot de palettisation (robot Okura), devenu obsolète et évoluant dans un espace fort restreint, a été remplacé par un robot Kuka 5 axes.
La charge maximale admissible sur la bride de fixation à portée maximale et vitesse élevée est de 180kg.
Le travail effectué
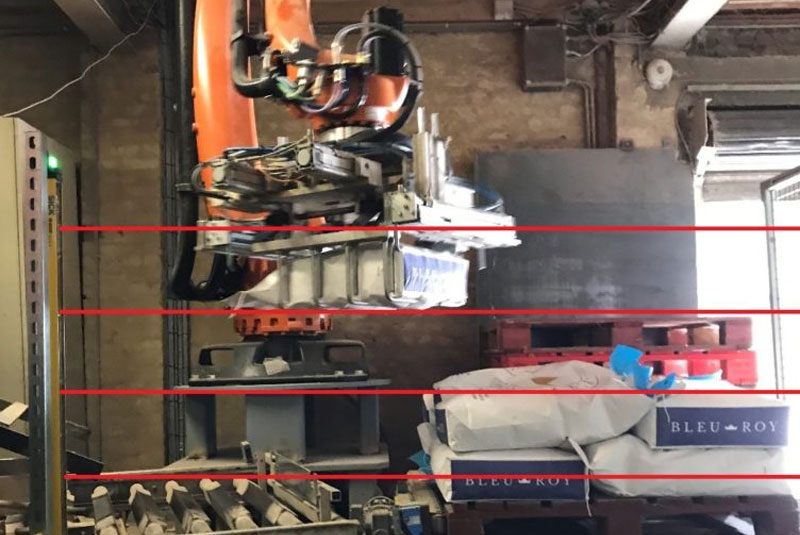
Une remise en ordre du préhenseur de 95kg a été réalisée.
Quatre fonctions pneumatiques permettent :
- De serrer le sac et de le guider lors de sa chute sur la palette (pinces droites),
- De soulever le sac par le dessous (pinces coudées),
- De déployer les vérins permettant la prise des palettes,
- D’effectuer la préhension des palettes.
Ce préhenseur a été équipé d’un télémètre laser dans le but de mesurer la hauteur réelle de la couche de sac en cours de palettisation. En effet, cela permet au nouveau robot d’adapter la hauteur de dépose du sac pour que ce dernier soit au plus proche de la couche précédemment déposée. De plus, le client n’a plus besoin d’encoder la hauteur des sacs en cours de fabrication en fonction du produit ensaché : le robot s’occupe lui-même de la mesure.
Une barrière immatérielle a également été installée. Elle permet à notre client d’intervenir en toute sécurité sur la filmeuse se situant en sortie du poste de palettisation.

Lorsqu’un opérateur entre dans la zone de la filmeuse, cette dernière est placée en état d’arrêt d’urgence, tandis que le robot adopte une vitesse réduite. Si l’opérateur venait à franchir le faisceau de protection, un arrêt d’urgence serait généré au sein du robot.
Au niveau des cadences, le robot place les sacs inférieurs en environs 4,5 secondes. En ce qui concerne les sacs des dernières couches, le robot doit effectuer un déplacement vertical plus important. La cadence est alors d’environs 6 secondes.
Les opérateurs réalisant l’ensachage sur le convoyeur en amont parvenaient à « suralimenter » l’ancien robot lorsque celui-ci atteignait la 7ième couche de palettisation. Ils ne sont, à l’heure actuelle, pas encore parvenu à saturer le robot Kuka. En effet, lors de nos tests, nous avons pu constater que la cadence réelle était bien supérieure à celle de l’ancien robot.
À LIRE AUSSI
Autres réalisations

Revamping Pont SABCA

Nouveau centre R&D chez Daikin
